概要
近年,Unmmaned Aerial Vehicle(以下UAV)と呼ばれる,無人航空機の実用的使用に注目が寄せられている. UAVとは,三次元空間を移動する飛行体あるいはロボットを意味する. UAVの最も大きな特徴は,三次元空間を自由に移動するモビリティの高さにあり,自動車等の地上を移動する機械システムと比べ,実現できる運動の自由度が高い.
これまでのUAVの研究はモデルの新規性やエネルギー効率,障害物の回避問題,そして実験検証に主眼がおかれており,一般のUAV制御の問題にアプローチしている研究は少ない. 特に非線形システム論による解析を与えているものや,劣駆動システムに対して新しい制御理論を展開しているものはあまり見られない.
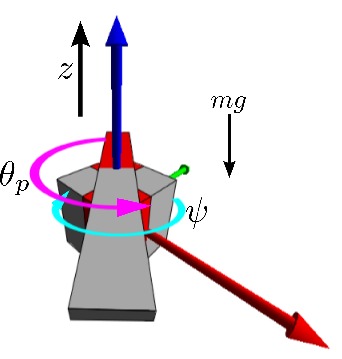
基本的にSE(3)空間での機体の制御に必要な入力数は4つとされているが,この入力数は減らせるのか,ということで,当研究室の片岡により,SE(3)空間における三入力飛行ロボットの解析が行われた. その結果,3入力では連続時不変フィードバックでは局所漸近可安定性がないことが明らかにされたが,その上である点にとどまらない周期的な運動は可能であることを示し,その運動制御理論の構築が行われた. またその制御理論を用いて,単純化させたモノロータ型飛翔体に対し擬似的なホバリングの運動制御理論の構築が行われた.
本研究では,片岡により考案されたモノロータ型飛行ロボットに対する制御理論を用いて,その有用性を示すために実験機の設計・製作を行い,その実験機を用いて擬似的なホバリングの実現を目指す.