本研究は人間のアクロバットな動作である跳躍着地運動に注目し,人間の簡易モデルであるAcrobotを制御対象として跳躍着地制御問題を実現することを目的としている. Acrobotとは,二つのリンクとリンク間の一つの回転型アクチュエータで構成されるロボットであり,非線形制御の分野において広く研究されている. Acrobotの跳躍着地運動を人間に例えるならば,人間の腰を回す力でバランスを取りながら上体をかがめ,所望の角度方向へ跳躍,着地,安定化をすることに相当する. 本研究は当研究室における人間型ロボットの走行研究の基礎となる研究でもある.
本システムの跳躍運動の大きな特徴は,一般化座標よりも入力の数が少ないシステム,つまり劣駆動システムであるということ. また,Acrobotが地面と接地している時には地面と位置拘束が働き,空中では角運動量保存則の拘束を受けることになるので,運動の状態によって拘束条件が変わる可変拘束なシステムであることが挙げられる. この2つの観点から,本システムの制御問題は非常に難しくなる.
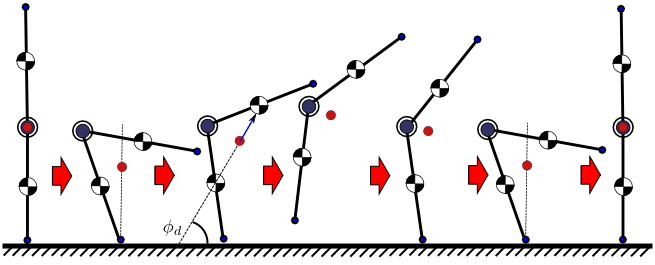
実際の制御戦略を立てるために,一連の跳躍着地運動を以下の4つのフェイズを設定する.
- 初期姿勢へ上体をかがめるフェイズを「遷移相」
- 目標の角度方向へ飛び立つフェイズを「離陸相」
- ロボットが空中にあるフェイズを「飛遊相」
- 着地時の撃力を受けながらも着地しバランスを取るフェイズを「着地相」
それぞれのフェイズにおいて,物理的直感に基づいて出力関数を設定し,出力関数を零化するフィードバック制御(出力零化制御)をすることで所望の動作を実現させる. 出力零化制御の結果,ゼロダイナミクスが制御出来ない不可観測な部分空間として残るが,あえてこの残ったダイナミクスのふるまいを利用することによって,人間の動作に近い挙動が得られる. 遷移相と着地相においては角運動量に基づく出力関数を零化することによって,重心位置が平衡多様体上に乗り,ゼロダイナミクスが収束するのでバランス安定化が可能となる. 離陸相においては,Acrobotの重心を目標の角度方向に乗るように制御をする. この時ゼロダイナミクスは発散し,空中に飛び立つだけのエネルギーを得ることが出来る. 空中時においては,角運動量保存則の拘束を受けるので上体を任意の姿勢にすることは出来ないが,足先から着地出来るように出力関数を選ぶ.
最後に,提案する制御手法の理論の有効性をシミュレーションだけでなく,実機での制御実験で検証した.
投稿論文・学会発表
- 片岡泰之,中浦茂樹,三平満司, "ゼロダイナミクスを利用したAcrobotの跳躍着地運動の制御", 第9回制御部門大会論文集,計測自動制御学会,2009
- 鶴巻浩史,中浦茂樹,三平満司, "Acrobot型劣駆動跳躍系の制御", 第7回「運動と振動の制御」シンポジウム,日本機械学会,2001
- 宮崎正博,三平満司,高橋晶子, "Acrobot型劣駆動跳躍系の制御", 日本機械学会ロボティクス・メカトロニクス講演会2000,2000