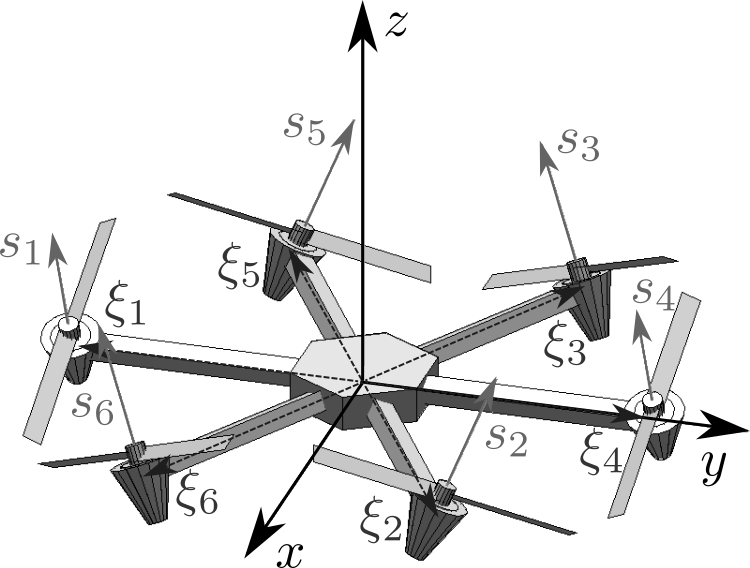
近年,マルチロータ型の無人航空機(UAV: unmanned aerial vehicle) の実用化が注目を集めている. 代表的なUAVの1つであるクアッドロータは4入力であるため, 機体の自由度に対して制御できるロータの数が少ない劣駆動系であり, 位置と姿勢の6自由度を独立に制御することができないということが知られている. そのため, クアッドロータはホバリング時の姿勢が1つしかないということや, 水平方向へ移動するときに姿勢変動を伴わなければならないという特徴があり, 狭い空間での移動や接触作業を伴う飛行が困難であるという問題がある. このような背景から,本研究では機体の6自由度を独立に制御することが可能なUAVであるヘキサロータに注目し, その制御手法について検討する.
ヘキサロータに対する代表的な制御手法の1つとして, 位置と姿勢のダイナミクスを分離して6自由度を独立に制御する非線形制御がある. この手法は目標位置付近などにおける精密な位置・姿勢制御に適していると考えられるが, 機体の構造によっては水平方向に動きにくい可能性があり, 大きな並進移動には不向きであると考えられる. 一方,ヘキサロータに対して1次近似線形化による線形制御を用いると, クアッドロータのように水平方向への移動に姿勢変動を伴うということが知られており, この手法は大きな並進移動に適している可能性がある. そこで,本研究ではこれら2つの制御手法の利点を活かすことができる状況が異なっていることに注目し, 状況に合わせた制御則の切り替えを行うことで,効率的なヘキサロータの制御が可能になることを示す.