近年,ロボット工学の分野において,様々な移動ロボットの提案・試作が行われてきた. 特に,生物の歩容の原理を理論的あるいは 実験的に解析し,運動機構として応用したロボット,または,車両を起点とし,用途に応じて機構を改良,発展させたロボットが多く見受けられる. その大半の機構は,胴体と脚あるいは車輪という構成である. 脚・車輪が少なければ,一般に姿勢は不安定になり易く,一旦倒れると起き上がるのは難しい. その一方,脚・車輪が多ければ,移動に対し必要以上に入力が多くなってしまう. 従って,ロボットの特長の一つとして移動特性のみを考慮した場合,``胴体-脚''の構成が必ずしも最適とは限らないと考えられる.
そこで本研究では,胴体-脚''あるいは胴体-車輪''といった構成ではなく,一般的な幾何学的形状の一つである``球体''の外形を成し,内部に駆動源を有するロボットに注目する.
ここで,球体特有の物理的性質について考えてみる. 例えば,球体が水平面に対して滑らず転がる場合,その対称性から転がり拘束が常に成立するため,倒れる動作と起き上がる動作に区別はなく,制御の観点からは,並進速度の生成のみを考慮すればよいことになる.
また,球体が水平面に対して跳ね返る場合,玩具として親しまれているsuperballのように衝突面に対し滑らず弾性的に衝突する条件が満たされれば,飛遊時に生成した回転速度によって衝突後の水平移動速度を自在に生成できる可能性がある. すなわち球体特有の``転がり''に関する接触条件により,比較的少ない入力数で,姿勢を気にせずむしろ姿勢の変化を積極的に利用した並進運動を実現できると考えられる.
そこで,本研究では,球体特有の接触条件である転がり拘束と弾性衝突に着目し,それぞれの接触条件に特化したこれまで詳細に扱われていない2つの機構例,すなわち,
- 転がり拘束:球殻内部の重心移動により球体の中心位置・姿勢を変化させる平面移動ロボット
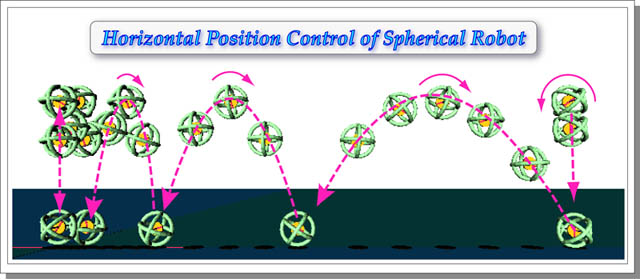
- 弾性衝突:弾性球殻内部の回転入力により衝突後の水平速度を変化させる跳躍運動ロボット
を想定し,このそれぞれについて,動力学を考慮した定式化に基づき,フィードバックによる運動制御の実現および数値シミュレー ションを通して,球体形状の移動ロボットとしての有効性を明らかにする事を目的とする.
公開動画
投稿論文・学会発表
- Toshiro YAMANAKA, Shigeki NAKAURA, and Mitsuji SAMPEI, "Hopping Motion Analysis of
Superball-like Spherical Robot Based on Feedback Control", Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003 - Toshiro YAMANAKA, Shigeki NAKAURA, and Mitsuji SAMPEI, "Hopping Motion of `SuperBall'-like Spherical Robot based on Feedback Control", Proceedings of the 21st Annual Conference of the Robotics Society of Japan