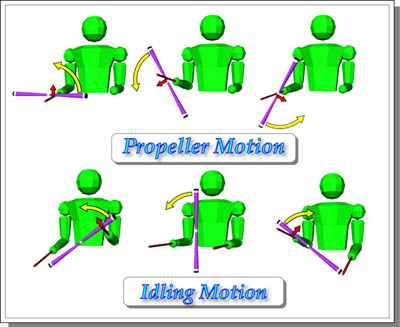
デビルスティックとは,人間が手に持った棒(ハンドス ティック)で空中に浮いている棒(センタースティック)を操る曲芸である. デビルスティックの芸では,ハンドスティックでセンタースティックを押す,または叩くことによってセンタースティックを落とさずにある状態に保ち続ける.
デビルスティックの研究では,両手に持ったハンドスティックでセンタースティックを交互に叩くことによってセンタースティックを空中に保つ運動の研究などが行われている. 押す力や叩く力で制御を行う際には制御入力に大きな拘束がある. 物体を引くことができないために物体の状態を変えることができる方向に制限があり,状態を制御することが困難となる.
本研究ではフィードバック制御によって持続回転運動の実現を目指している. そのために以下のようなアプローチをとっている. まず,人間がデビルスティックの芸を行っている時の運動を観察することによって出力関数を設定し,フィードバックによる出力零化制御を行う. このシステムにはセンタースティックの姿勢角が不可観測な状態として現れるため,出力零化の状態で姿勢角が望ましい挙動を示すための条件についての解析を行う. 解析は微分方程式を解くことによって行うが,微分方程式を,時間に関する情報を消去するように変換し,角度と角速度を対応づけた相空間における挙動の解析を行う. 姿勢角の角速度が,姿勢角に対して周期的な挙動を示すことがこの制御での目的と考え,周期軌道に漸近するための条件を求める.
次に,入力である押す力を大きくし,負にならないようにするための条件を求める. 制御の際に必要とされる入力は遠心力に依存し,遠心力が大きくなるほど制御に必要な押す力が大きくなる,という点に注目し,角速度の大きさを変えることによって押す力のみで制御できることを示す. 姿勢角の角速度に関する条件,押す力のみで制御を行うための条件のどちらもハンドスティックでセンタースティックを押す位置の条件として表すことができ,両方の条件を同時に満たすことができることを示す.
最後に,その解析結果に基づいて,不可観測な部分を安定化しつつ押す力のみで制御できるような制御則を提案し,制御則の有用性をシミュレーションにより確認している.
公開動画
投稿論文・学会発表
- Keisuke NAKAMURA, Shigeki NAKAURA, and Mitsuji SAMPEI, "Enduring Rotary Motion Experiment of Devil Stick by General-Purpose Manipulator. Motion and Vibration Contorl: Selected Papers from MOVIC 2008", Springer-Verlag, 2008
- Keisuke NAKAMURA, Shigeki NAKAURA, and Mitsuji SAMPEI, "Enduring Rotary Motion Experiment of Devil Stick by General-Purpose Manipulator", Proceedings of the 9th International Conference on Motion and Vibration Control, 2008
- Yasuyuki KAWAIDA, Shigeki NAKAURA, Ryusuke OHATA, and Mitsuji SAMPEI, "Feedback Control of Enduring Rotary Motion of Devil Stick", Proceedings of the 42nd IEEE Conference on Decision and Control
- 中浦茂樹,藤本大介,三平満司, "汎用マニピュレータによるデビルスティックの持続回転運動制御", 第5回計測自動制御学会制御部門大会,2005
- Shigeki NAKAURA, Yasuyuki KAWAIDA, Tadasuke MATSUMOTO, and Mitsuji SAMPEI, "Enduring Rotary Motion Control of Devil Stick", Preprint of 6th IFAC-Symposium on Nonlinear Control Systems, 2004
- Ryusuke OHATA, Yasuyuki KAWAIDA, Shigeki NAKAURA, and Mitsuji SAMPEI, "Feedback Control Experiment of Enduring Rotary Motion of Devil Stick", Proceedings of the 42nd SICE Annual Conference, 2003
- Yasuyuki KAWAIDA, Shigeki NAKAURA, Ryusuke OHATA, and Mitsuji SAMPEI, "Feedback Control of Enduring Rotary Motion of Devil Stick", Proceedings of the 42nd IEEE Conference on Decision and Control, 2003
- 川井田康礼,中浦茂樹,大畠龍介,三平満司, "デビルスティックの持続回転運動のフィードバック制御", 第8回「運動と振動の制御」シンポジウム,日本機械学会,2003