非線形性を有する制御対象は身の回りに数多くあります. その中でもけん引車両や宇宙ロボットなどのシステムはノンホロノミックシステムと呼ばれるクラスに分類され,理論的に制御しづらいシステムとなることが知られています.
本研究室ではこのノンホロノミックシステムに対して新しい視点からの制御戦略を提案しています.
通常のシステムの状態方程式は実時間に対してシステムの微分方程式を記述します. しかし,この方法では過去から未来へ向かって一定に流れる時間軸の中での制御に限られるため,単純な静的連続状態フィードバックはノンホロノミックなシステムに対する安定な制御器が設計できないことが知られています.
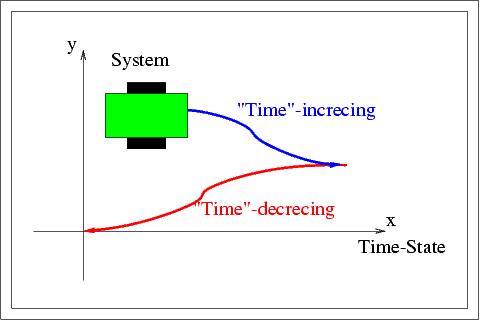
そこで、制御戦略として状態依存で変化する時間軸を考えます. たとえばシステムの状態のうちひとつを選んでそれを時間軸として扱うことはその典型的な方法の一つです。この戦略を時間軸状態制御形といいます. この戦略を用いて新しく選んだ時間軸をうまく動かすことでノンホロノミックなシステムを線形フィードバック制御の枠組みで扱うことができます.
時間軸状態制御形は制御系設計における柔軟性や拡張性に優れているという利点があり,シミュレーションや実験等によってその有効性を示す研究は本研究室でも数多く存在します. たとえばトレーラーの経路追従制御,転がり接触拘束を受ける物体の操り問題など非常に広いクラスのノンホロノミック系に適用できることが示されています.
また,時間軸状態制御形それ自身の研究として時間軸状態制御形に基づく制御方策の収束性解析があります. この制御戦略に対する研究,あるいはこれを活用する研究は産業への実用化を睨みこれからさらに発展していくことが期待されています.
投稿論文・学会発表
- Mitsuji SAMPEI and Katsuhisa FURUTA, "On Time Scaling for Nonlinear Systems: Application to Linearization", IEEE Trans. on Automatic Control, 1986
- 三平満司,古田勝久,"時間軸の変換を用いた非線形システムの線形化-新時間軸での線形化-", 計測自動制御学会論文集,1986