本研究では,ロボットの研究者などの間で近年盛んに研究されている,ロボットハンドによる物体の操り問題, その中でも特にハンドと物体の転がり運動を用いたマニピュレーション問題を取り上げる. 今回は特に対象となる物体を球に限定した問題に対し, これまでの研究で行なわれていなかった状態フィードバックを用いた制御系設計法を提案する.
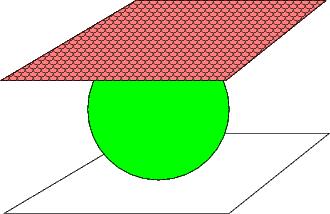
本研究では,上下2枚の板に挟まれて運動する剛球を考え, この板と球の位置及び球の姿勢を目的の値に制御することを目的とする. 位置制御と姿勢制御を二段階に分けて行う方法が比較的制御が容易であるので, 位置制御をはじめに行ない,制御終了後に姿勢の制御を行なう方法を提案する.
転がりを用いたマニピュレーション問題は非ホロノミックな拘束を持つシステムであり,さらに, このシステムは一般に非ホロノミックシステムに対する有効な制御系設計法と言われている, Chainedformと呼ばれる形への変換が出来ないシステムである. そこで今回は,我々の研究室が以前から提唱している時間軸状態制御形への変換手法を用いることで制御系を設計する.
球の姿勢の運動を表す状態方程式を時間軸状態制御形に変換し,変換後のシステムに対し, 状態方程式の一次近似が0となる一つの状態を除く,残りの状態方程式を一次近似線形化する. ここで一次近似線形化を用いたのはこのシステムに対しては厳密な線形化手法が適用できなかった為である.
この線形化システムは可制御となったので,従来の線形制御理論を用いて制御器を設計することが出来る. 一次近似が0となる状態に関しては,制御が出来ない一方で, 初期値からほとんど動くことはないので,この状態の初期値を0とするような座標系を取ることで, 制御をする必要が無くなることを示す. また,制御を行った結果,一次近似の誤差によってこの状態の最終値に偏差が残ってしまうことがあることを示した上で, この様な場合の対処法を示す.
動画
- 姿勢制御
- シミュレーション
- 実験
- シミュレーション
- 位置制御
- シミュレーション
- 実験
- シミュレーション
- 位置・姿勢制御
- シミュレーション
- 実験
- シミュレーション
投稿論文・学会発表
- Hisashi DATE, Mitsuji SAMPEI, Masato ISHIKAWA, and Masanobu KOGA, "Simultaneous Control of Position and Orientation for Ball-Plate Manipulation Problem Based on Time-State Control Form", IEEE Trans. on Robotics and Automation, 2004
- 伊達央,三平満司, "球体操りシステムのフィードバック制御", 計測自動制御学会機械システム制御シンポジウム,2002
- Hisashi DATE, Mitsuji SAMPEI, Daisuke YAMADA, Masato ISHIKAWA, and Masanobu KOGA, "Manipulation Problem of a Ball between Two Parallel Plates Based on Time-State Control Form", Proceedings of the 38th IEEE Conference on Decision and Control, 1999
- Mitsuji SAMPEI, Shintaro MIZUNO, Mitsuru SEGAWA, Masato ISHIKAWA, Hisashi DATE, and Daisuke YAMADA, "A Feedback Solution to Ball-plate Problem based on Time-state Control Form", 1999 American Control Conference, 1999
- 水野伸太郎,三平満司,古賀雅伸,石川将人, "転がりを用いた球体の姿勢制御", 日本ロボット学会誌,1998
- 三平満司,水野伸太郎,石川将人,古賀雅伸, "2板間に挟まれて運動する剛球の位置制御", 日本ロボット学会誌,1996