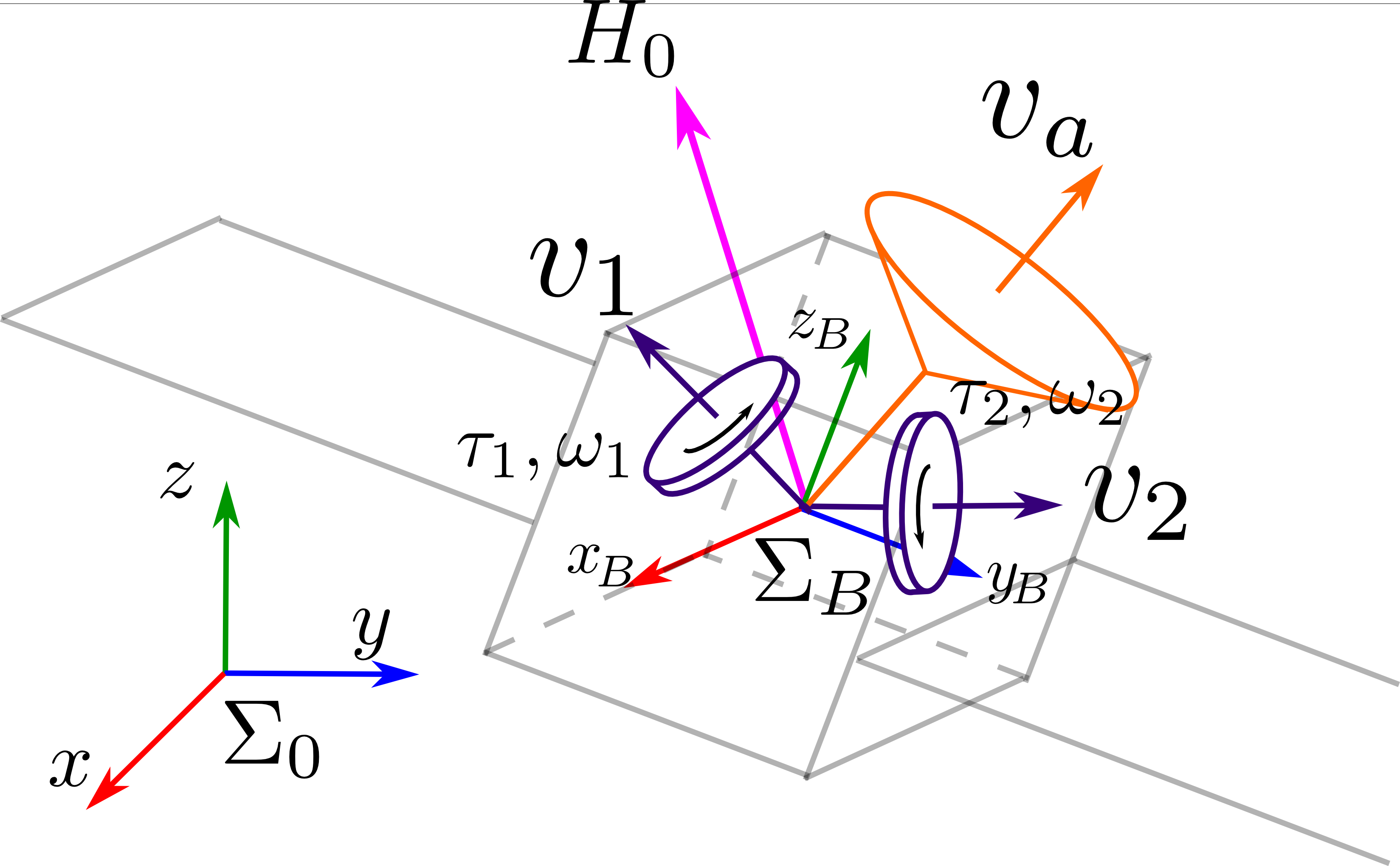
人工衛星は通常,機体に取り付けた3つのリアクション・ホイールを回転させることでその姿勢を制御している. しかし,宇宙空間での長期運用中にホイールが故障した場合を想定し,本研究ではホイール2つで姿勢制御を行う手法を提案している.
宇宙空間における姿勢は,角運動量保存による拘束を受けるため,理論的に制御しづらいシステムである. このシステムに対して,機体に初期角運動量がはたらかない場合には,ホイール2つだけでも姿勢3自由度すべてを制御可能であり,任意の姿勢で安定化が可能であることが知られている. 一方で,初期角運動量がはたらく場合には任意の姿勢では安定化を行うことができない. 本研究ではこの後者の場合を扱い,この場合でも最低限地球との通信を確保するために,通信アンテナの方向を制御する指向制御を行うことを制御目標としている.
本研究では平衡点解析と回転方向解析,可制御性解析を行うことで,初期角運動量を有する2ホイール衛星の達成可能な制御目標をホイールとアンテナの配置ごとにつぎの3つに分類可能であることを明らかにしている.
- アンテナを目標方向に向けた状態で,平衡点に姿勢を収束させることができる場合.
- アンテナを目標方向に収束させることができるが,アンテナまわりの回転が残る場合.
- 周期的にアンテナを目標方向に向けることができる場合.
また,それぞれの場合について具体的な制御則の構築を行う. 1と2では,それぞれ目標を達成するための出力関数を設定し,システムの入出力線形化を行う. そして,線形化サブシステム対して線形制御器を設計することで制御目標を達成する. また,残りのサブシステムに対するゼロダイナミクスを解析することによりシステム全体の安定性を示すことができる. 一方で,3は田原らの先行研究で示されている手法を用いることで制御可能である.
動画
- 収束するケース
- 回転が残るケース
投稿論文・学会発表
- Y. Katsuyama, T. Ibuki and M. Sampei, "Attitude Controllability Analysis of an Underactuated Satellite with 2 Reaction Wheeles and Its Control", 54th IEEE Conference on Decision and Control, 2015
- 勝山 裕輝,関口 和真,三平 満司 "時間軸状態制御系を用いた2ホイール衛星の姿勢制御", 第57回システム制御情報学会研究発表講演会, 2013
- 勝山 裕輝,関口 和真,三平 満司 "初期角運動量を有する宇宙機のホイール故障時における劣駆動姿勢制御", 日本機械学会第13回「運動と振動の制御」シンポジウム, 2013
- Yuki Katsuyama, Kazuma Sekiguchi and Mitsuji Sampei "Spacecraft attitude control by 2 wheels with initial angular momentum", SICE Annual Conference, 2013
- 勝山 裕輝,関口 和真,三平 満司 "時間軸状態制御系を用いた2ホイール衛星の姿勢制御", システム制御情報学会論文集, Vol.27, No.5, pp.193-199, 2014