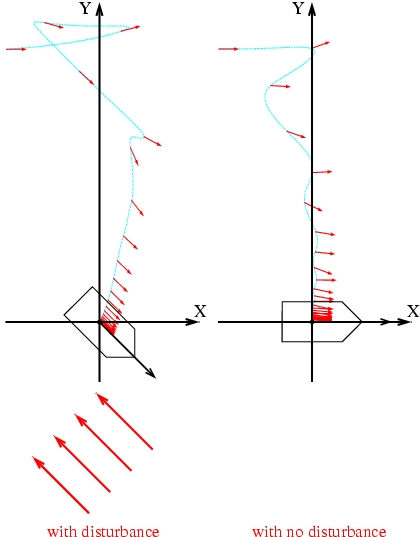
同じ船舶でも,外乱が存在する場合とそうでない場合ではその制御特性は大きく異なる. しかし,実際に海などを航行する船舶はその周りの環境の特性上,波や海流などの外乱が存在するなかを航行する場合もあればそうでない場合もあるので,制御則も双方の場合において有効となるものが望ましい.
外乱が存在しない場合における船舶のシステムは,前進・旋回に関する入力のみによって水平面上の位置と姿勢を全て制御することができる. しかしBrockettの定理により連続時不変な制御則では状態を原点に収束させることができないので,制御するためには不連続な制御則や時不変な制御則を用いる必要がある. 対して,外乱が存在する場合は,船首か船尾を外乱の方向に向けなければ船体を静止させることができない. しかし外乱が存在しない場合とは異なり,連続時不変な制御則によって制御することが可能なので,制御系の設計はそれと比べ容易である.また外乱の大きさや方向など通常は未知とされる値を取り扱う必要がある.
このように,外乱が存在する場合とそうでない場合では静止できる姿勢,制御するために必要な制御則の条件,未知の値の有無など制御問題としては異なる点は多い. よって本研究ではそれらの特性を踏まえ,時不変な制御則,外乱の大きさや方向の推定など複数の手法を用い,外乱が存在しない場合,存在する場合の双方を意識した上での劣駆動船舶の位置制御問題を取り扱う.
投稿論文・学会発表
- Yohei TAKAHASHI, Shigeki NAKAURA, and Mitsuji SAMPEI, "Position Control of Surface Vessel with unknown Disturbances", Proceedings of the 46th IEEE Conference on Decision and Control, 2007.