
Acrobotとは2つのリンクとリンク間の回転型アクチュエータで構成されるようなタイプのロボットである. これは一般化座標より入力の数のほうが少ない劣駆動システムであり,また,強い非線形性を有することから非線形制御の分野において広く研究されてきた. 特に人間のさまざまな動作を模した研究が数多く行われ,本研究室においても鉄棒運動や跳躍運動などを行うAcrobotの研究が行われている.
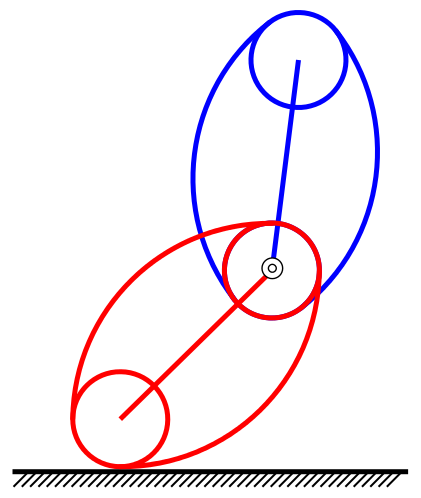
以上の特徴をもつAcrobotの一種として,リンクの輪郭が円弧の曲面で形成され転がり運動を行うDenguribotが本研究室で考案され,これに対して以下のような様々な研究が行われている.