GALLERY
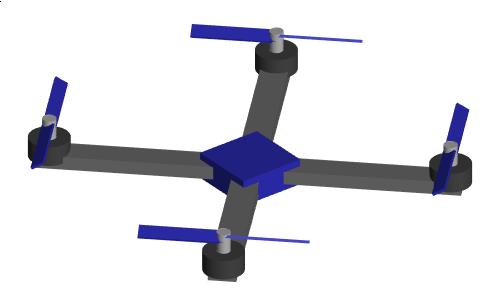
3D Inverted Pendulum on a Quadrotor
The outstanding mobility of multirotor UAVs enables them to carry out various kinds of tasks. To seek the limits of the ability, we tackled the inverted pendulum stabilization on a quadrotor. We provided a bilinear approximation model of the quadrotor based on 2nd-order Taylor expansion. This enables to utilize not only horizontal but also vertical motion for pendulum stabilization, while the 1st-order approximation cannot. An inverse optimal controller for bilinear systems is applied to the quadrotor-pendulum system, and the stabilization is achieved.
We shot videos of the experiment recently, and they are available on YouTube:
Experiment
Simulation
Related articles:
TreeD: A 3D Structure Visualization Toolkit for MATLAB
MATLAB has very powerful visualization features, and we often rely on the 'force' when making publications. However, we need to write tons of 'patch' or 'surf' commands with many complex options when we try to create a neat 3D visualization of simulations.
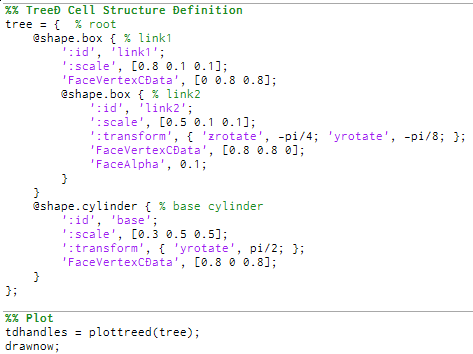
TreeD, a 3D visualization toolkit for MATLAB, takes us out of the jail. You only need to write a tree structure with simple format, and call 'plottreed' function. The tree structure represents the shape of the object by connections and transformations of the primitive shapes (box, cylinder, cone, etc.). You can also create animated figures which are suitable for simulation visualization.
Example Code
Result
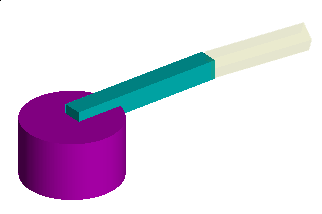
You can go further... See example2.m in the repository for the trick.